1. Proprietates technicaeMotor eVTOL
In electrica distributaPropulsione, motores plures helices vel ventilatores in alis vel fuselagio impellunt ad systema propulsionis formandum quod impulsum aeroplano praebet. Densitas potentiae motoris directe capacitatem oneris aeroplani afficit. Capacitas potentiae productae, fides et adaptatio ad ambientem motoris factores magni momenti sunt ad proprietates dynamicas et salutem aeroplani electrice propulsi determinandas. Selectio vehiculorum electricorum, dronorum et motorum eVTOL differt propter diversos sumptus, scenaria applicationis et alias causas [1].

(Fons photographicus: situs interretialis officialis Network/Safran)
1) Vehicula electricaMagnetes permanentioresmotores synchroniMotores magnetis permanentis cum maiori efficacia et maiori momento torquendi meliorem experientiam incessus praebere possunt. Simul, magna densitas potentiae motorum magnetis permanentis etiam vehiculis electricis adiuvare potest ut maiorem potentiam sub eodem volumine consequantur.
(2) UAV: vulgo sine spazzolis adhibitumMotor DC.Motor DC sine spazzolis pondus et strepitum leve habet, et sumptus sustentationis humiles sunt, quod aptum est necessitatibus volandi UAV; Deinde, celeritas motoris DC sine spazzolis maior est, quod aptum est necessitatibus volandi celeritatis dronum. Exempli gratia, DJI motoribus sine spazzolis utitur.
(3) eVTOL: Cum maiores necessitates habeant pro efficientia motoris et densitate momenti, motor synchronus magnetis permanentis solutio valde promittens est pro systemate potentiae propulsionis electricae, quia motor magnetis permanentis fluxus axialis altam ratem utilizationis spatii radialis habet, et densitas potentiae et densitas momenti commoda offerunt in casu parvae rationis longitudinis diametri. Hodiernae aeroplanae electricae VTOL, ut Joby S4 et Archer Midnight, omnes motores synchronos magnetis permanentis adoptant [1].
Figura sequens imaginem nubis intensionis inductionis magneticae rotoris fixi motoris fluxus axialis unius statoris unius rotoris ostendit.
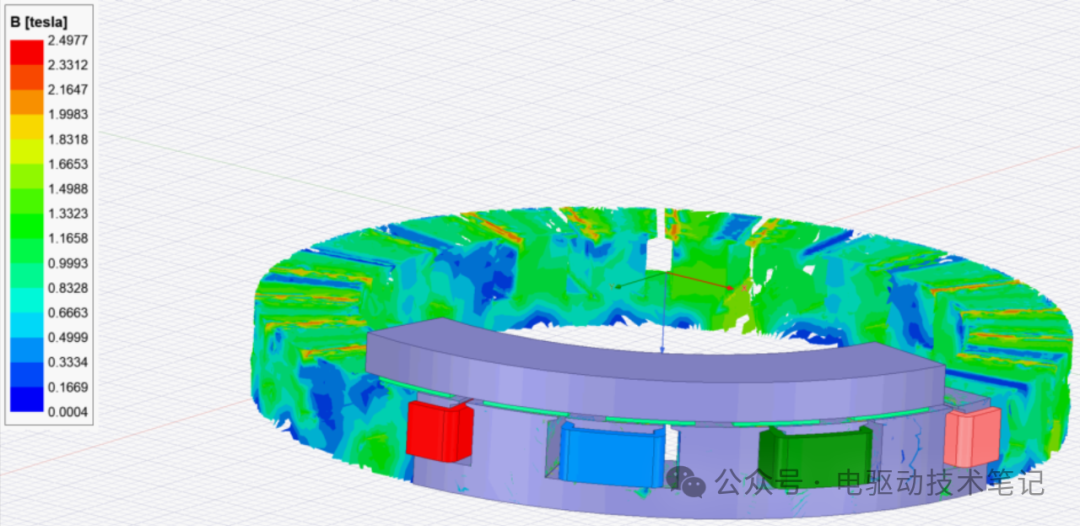
Figura sequens comparationem parametrorum motoris aeroplanorum electricorum et vehiculorum electricorum exhibet.

2. Proclivitas progressionis motoris eVTOL
In praesenti, principale progressum systematis potentiae eVTOL est pondus structurae motoris et pondus auxiliare systematis refrigerationis reducere per emendationem technologiae designationis electromagneticae, technologiae administrationis thermalis et technologiae levitatis, et constanter augere densitatem potentiae motoris et capacitatem potentiae productae sub ampla varietate condicionum variabilium. Secundum "Investigationem et Progressionem Autocinetorum Volantium et Technologiarum Clavium", motor propulsionis aviationis potuit densitatem potentiae nominalem corporis motoris plus quam 5kW/kg facere utendo materiis insulationis cum limitibus temperaturae altioribus, materiis magnetis permanentis cum densitate energiae magneticae altiore et materiis structuralibus levioribus. Meliorando designationem structurae electromagneticae motoris, ut usu ordinum magneticorum Halbach, structurae sine nucleo ferreo, convolutione fili Litz et aliis technologis, necnon designationem dissipationis caloris motoris emendando, expectatur densitatem potentiae nominalem corporis motoris 10kW/kg anno 2030 attingere posse, et densitatem potentiae nominalem 13kW/kg anno 2035 excedere [1].

3. Comparatio viarum electricarum purarum et hybridarum
Comparatum cum via pura electrica et via hybrida, ex delectu hodierno fabricatorum pertinentium, proiectum domesticum eVTOL praecipue in schemate puro electrico fundatur, densitate energiae accumulatorum lithium-ion limitatum, et eVTOL capacitate parvae personarum optimam scaenam advectionis technologiae propulsionis purae electricae praebet. Transmarinis, nonnulli fabricatores consilium hybridum antea exposuerunt, et ducem in multis probationibus et iterationibus susceperunt. Ut ex tabula sequenti videri potest, schema hybridum manifeste validius est in angulo tolerantiae, et plures applicationes in futuro in scenario negotiationis mediae-longae distantiae et parvae altitudinis consequi potest [1].
Tempus publicationis: XXVII Februarii, MMXXXV